基于MCU与DSP的双机压电捷联惯导系统设计与工业控制应用
随着高精度导航与控制需求的日益增长,压电捷联惯导系统因其结构紧凑、动态响应快等优势,在工业控制与电子电器系统开发领域备受关注。本文将探讨一种基于微控制器(MCU)与数字信号处理器(DSP)的双机协同架构,在压电捷联惯导系统中的应用及其对工业控制系统的革新。
一、系统架构与核心优势
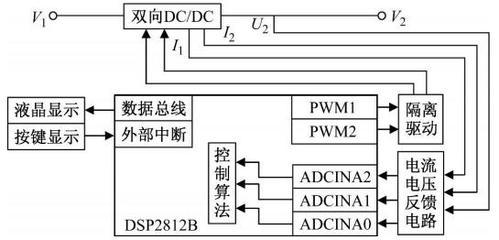
该系统采用MCU与DSP协同工作的双机架构。MCU作为系统管理核心,负责传感器数据采集、通信接口控制、任务调度及人机交互等上层逻辑;DSP则专注于高性能数字信号处理,如惯性传感器的数据滤波、姿态解算、导航算法实时运算等。这种分工充分发挥了MCU的控制灵活性与DSP的运算高效性,尤其适合处理压电惯性传感器产生的高频、高动态信号。
压电捷联惯导系统利用压电效应感知角速度和加速度,其输出信号微弱且易受噪声干扰。双机架构中,DSP可实时执行卡尔曼滤波等复杂算法,有效提升信噪比与姿态精度;MCU同步确保系统稳定运行,并通过工业总线(如CAN、EtherCAT)与外部控制单元交互,实现精准闭环控制。
二、在工业控制与电子工程中的应用
在工业自动化领域,该系统可为机器人、数控机床、无人搬运车等设备提供高精度自主导航与运动控制。例如,在柔性制造线上,集成该惯导系统的机械臂能实时感知自身姿态微变,通过MCU-DSP协同调整运动轨迹,提升装配精度与效率。
在电子电器控制系统开发中,双机架构增强了系统的可靠性与扩展性。MCU管理电源、故障诊断及安全协议,DSP处理实时导航数据,二者通过共享内存或高速接口同步数据。这种设计不仅满足严苛的工业环境要求(如抗振动、电磁兼容),还可适配多种传感器融合方案(如结合视觉或激光雷达),为智能家电、无人机等消费电子提供低成本、高性能的惯性感知方案。
三、开发挑战与未来展望
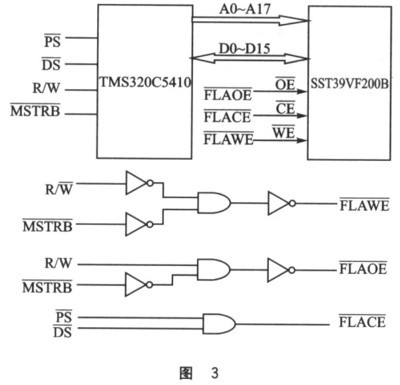
实现该系统的关键挑战在于软硬件协同优化。需精心设计MCU与DSP间的通信协议,确保数据低延迟交换;算法需在DSP上高效部署,如利用其并行处理能力加速矩阵运算。压电传感器的温度漂移补偿、系统功耗控制也是工程难点。
随着边缘计算与人工智能的发展,双机架构可进一步升级:MCU集成轻量AI框架用于决策,DSP强化实时信号处理,结合5G或TSN(时间敏感网络)实现云端协同。这将推动压电捷联惯导系统在工业物联网、自动驾驶等领域的更广泛应用,持续赋能电子工程世界的创新。
###
MCU与DSP双机压电捷联惯导系统,通过硬件分工与算法优化,平衡了性能、成本与可靠性,为工业控制与电子电器开发提供了高效解决方案。其模块化设计及开放接口,正助力工程师构建更智能、响应更迅捷的控制系统,引领精密导航技术向更广泛场景渗透。
如若转载,请注明出处:http://www.kaxiaomo.com/product/16.html
更新时间:2026-06-18 21:47:28